K. Aoshima, D. Lindmark, and M. Servin. Examining the simulation-to-reality-gap of a wheel loader interacting with deformable terrain. 11th Asia-Pacific Regional Conference of the ISTVS. September 26-28, 2022, Harbin, China (2022). [
pdf]
Simulators are essential for developing autonomous control of off-road vehicles and heavy equipment. They
allow automatic testing under safe and controllable conditions, and the generation of large amounts of synthetic
and annotated training data necessary for deep learning to be applied [1]. Limiting factors are the computational
speed and how accurately the simulator reflects the real system. When the deviation is too large, a controller
transfers poorly from the simulated to the real environment. On the other hand, a finely resolved simulator easily
becomes too computationally intense and slow for running the necessary number of simulations or keeping
realtime pace with hardware in the loop.
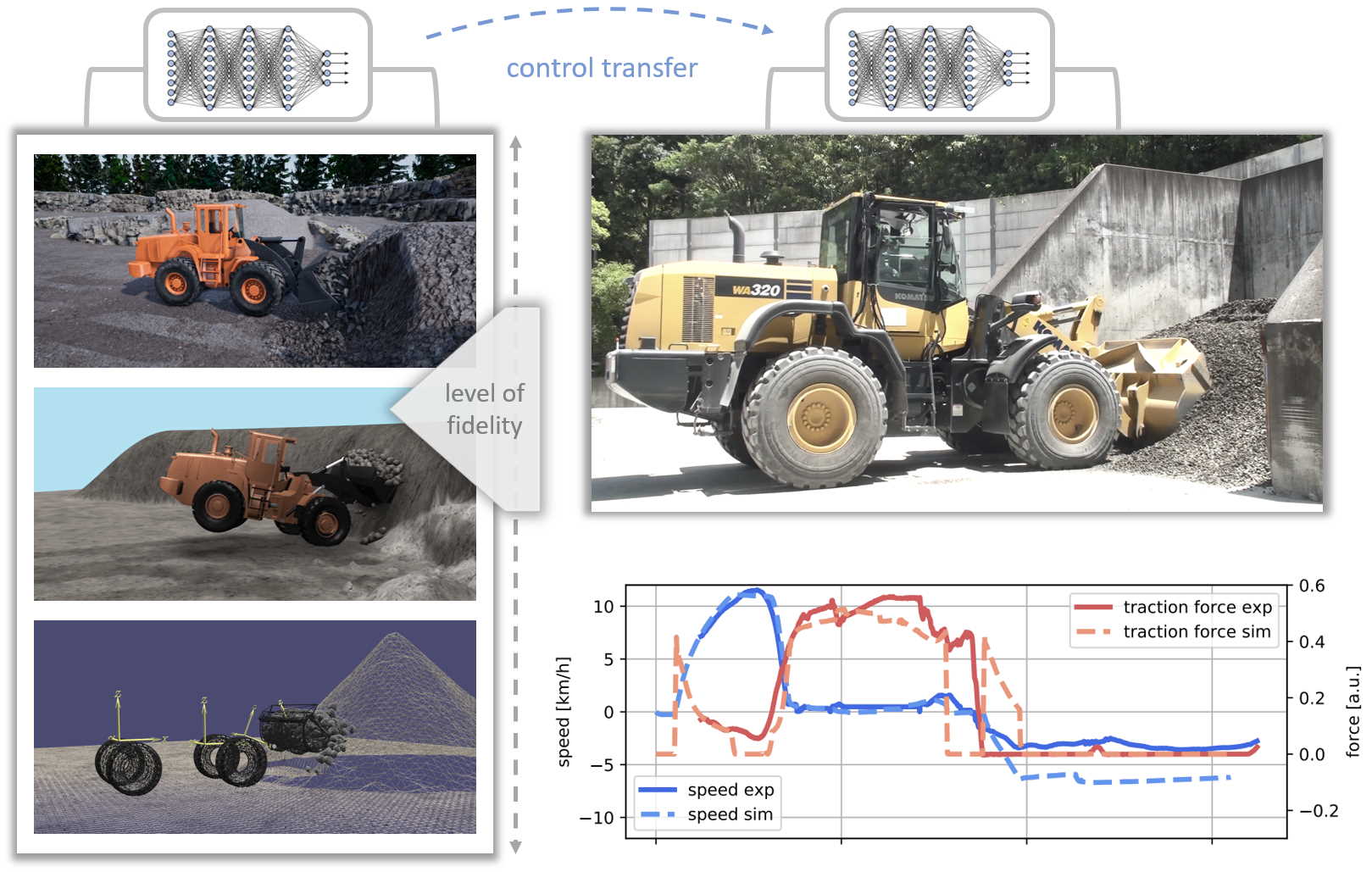
We investigate how well a physics-based simulator can be made to match its physical counterpart, a full-scale
wheel loader instrumented with motion and force sensors performing a bucket filling operation [2]. The
simulated vehicle is represented as a rigid multibody system with nonsmooth contact and driveline dynamics.
The terrain model combines descriptions of the frictional-cohesive soil as a continuous solid and particles,
discretized in voxels and discrete elements [3]. Strong and stable force coupling with the equipment is mediated
via rigid aggregate bodies capturing the bulk mechanics of the soil. The results include analysis of the
agreement between a calibrated simulation model and the field tests, and of how the simulation performance and
accuracy depend on spatial and temporal resolution. The system’s degrees of freedom range from hundreds to
millions and the simulation speed up to ten times faster than realtime. Furthermore, it is investigated how
sensitive a deep learning controller is to variations in the simulator environment parameters.
Video
|
|
UMIT Research Lab, Digital Physics
|