We investigate how well a physics-based simulator can replicate a real wheel
loader performing bucket filling in a pile of soil. The comparison is made using
field test time series of the vehicle motion and actuation forces, loaded mass,
and total work. The vehicle was modeled as a rigid multibody system with frictional
contacts, driveline, and linear actuators. For the soil, we tested discrete
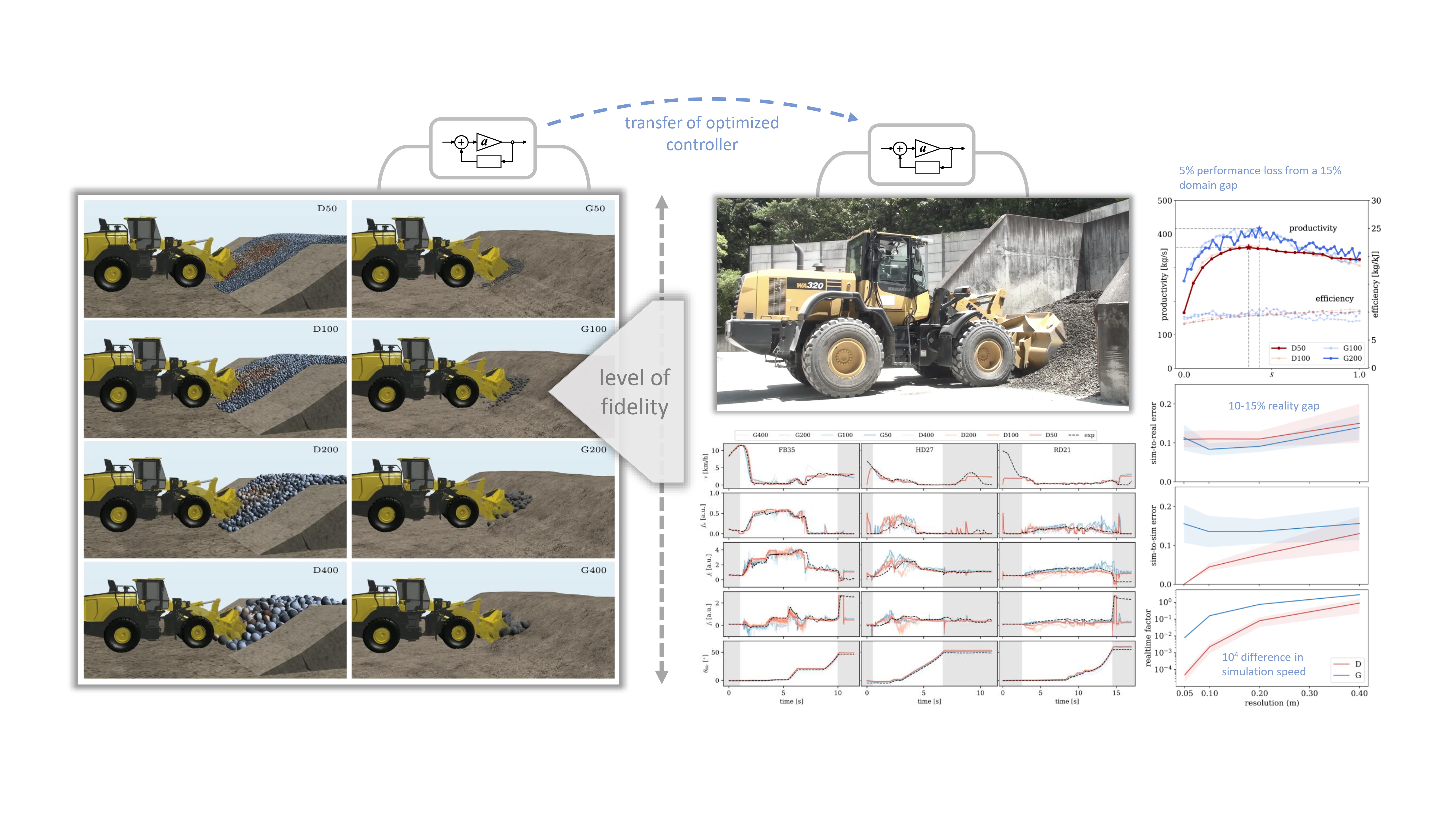
element models of different resolutions, with and without multiscale acceleration.
The spatio-temporal resolution ranged between 50-400 mm and 2-500 ms,
and the computational speed was between 1/10,000 to 5 times faster than real-
time. The simulation-to-reality gap was found to be around 10% and exhibited a
weak dependence on the level of fidelity, e.g., compatible with real-time simulation.
Furthermore, the sensitivity of an optimized force feedback controller under
transfer between different simulation domains was investigated. The domain bias
was observed to cause a performance reduction of 5% despite the domain gap
being about 15%.