E. Wallin, V. Wiberg, F. Vesterlund, J. Holmgren, H. Persson, and M. Servin. Learning multiobjective rough terrain traversability. Journal of Terramechanics 102:17-26 (2022)
doi:10.1016/j.jterra.2022.04.002 [
pdf]
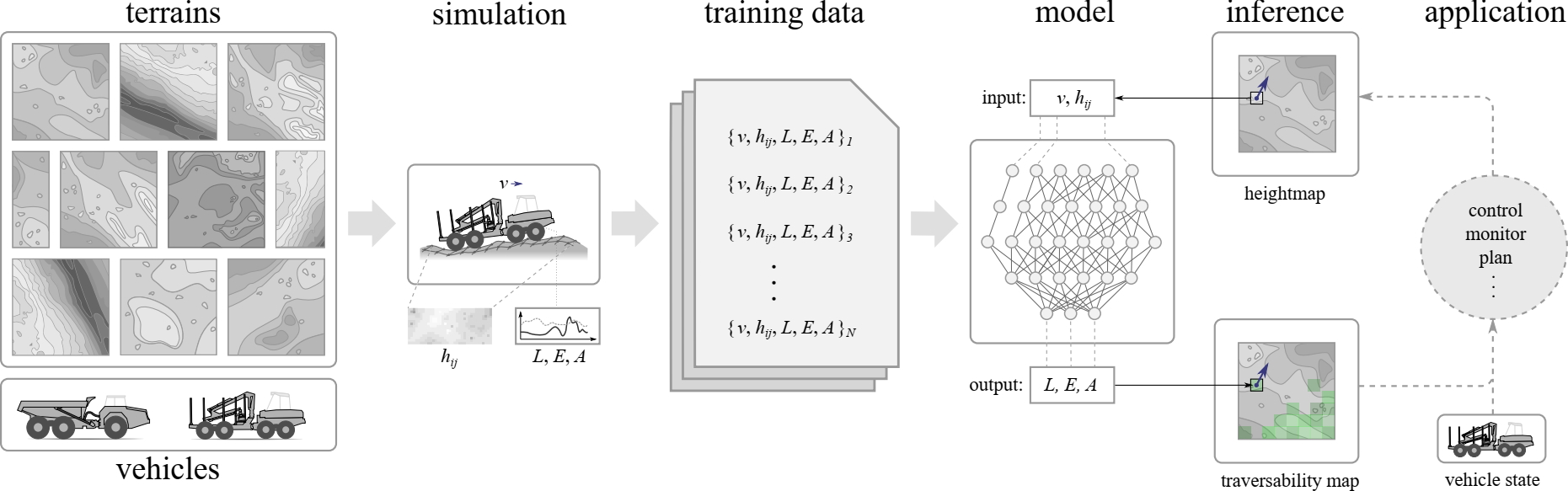
We present a method that uses high-resolution topography data of rough terrain and ground vehicle simulation to predict traversability.
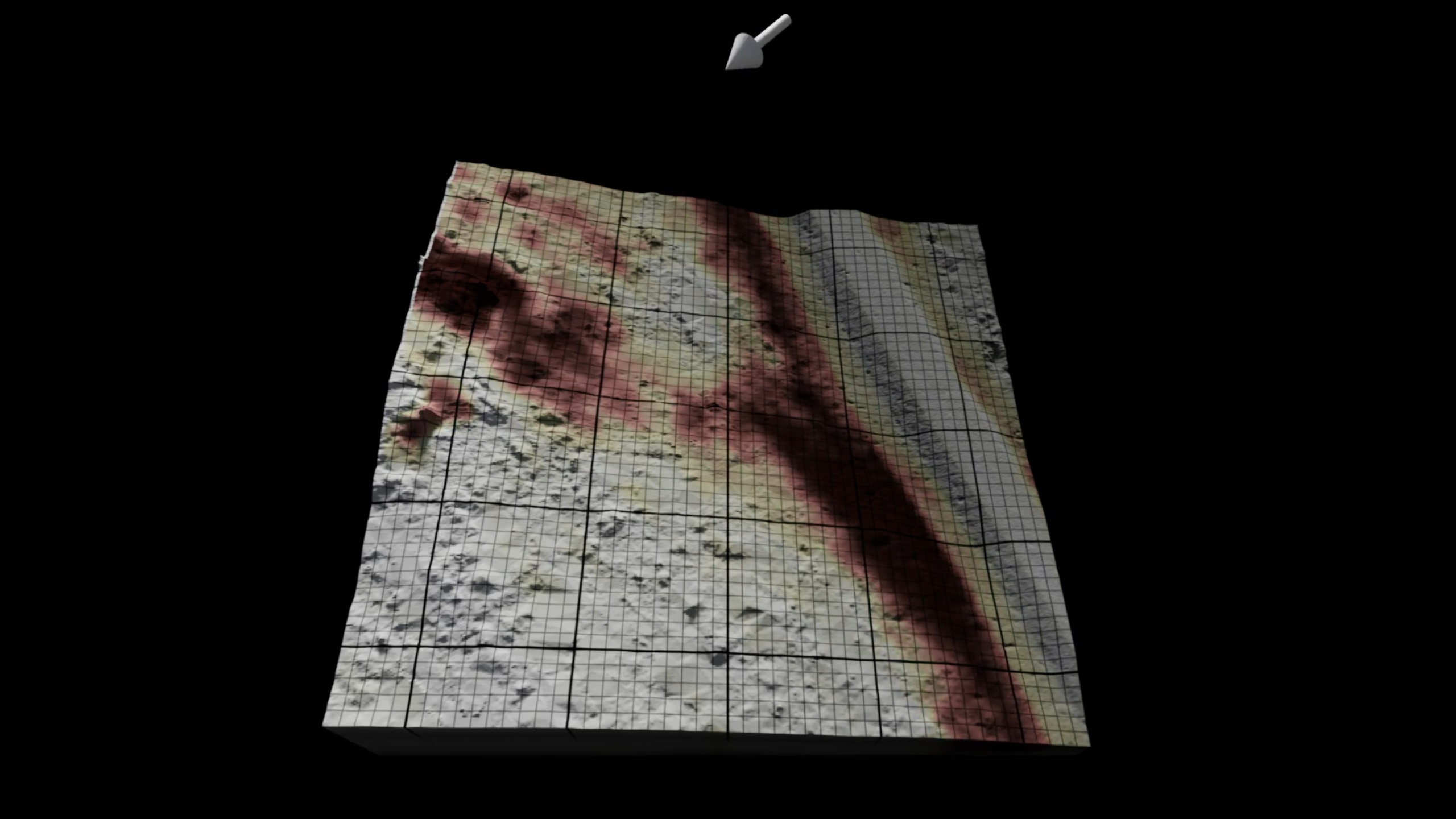
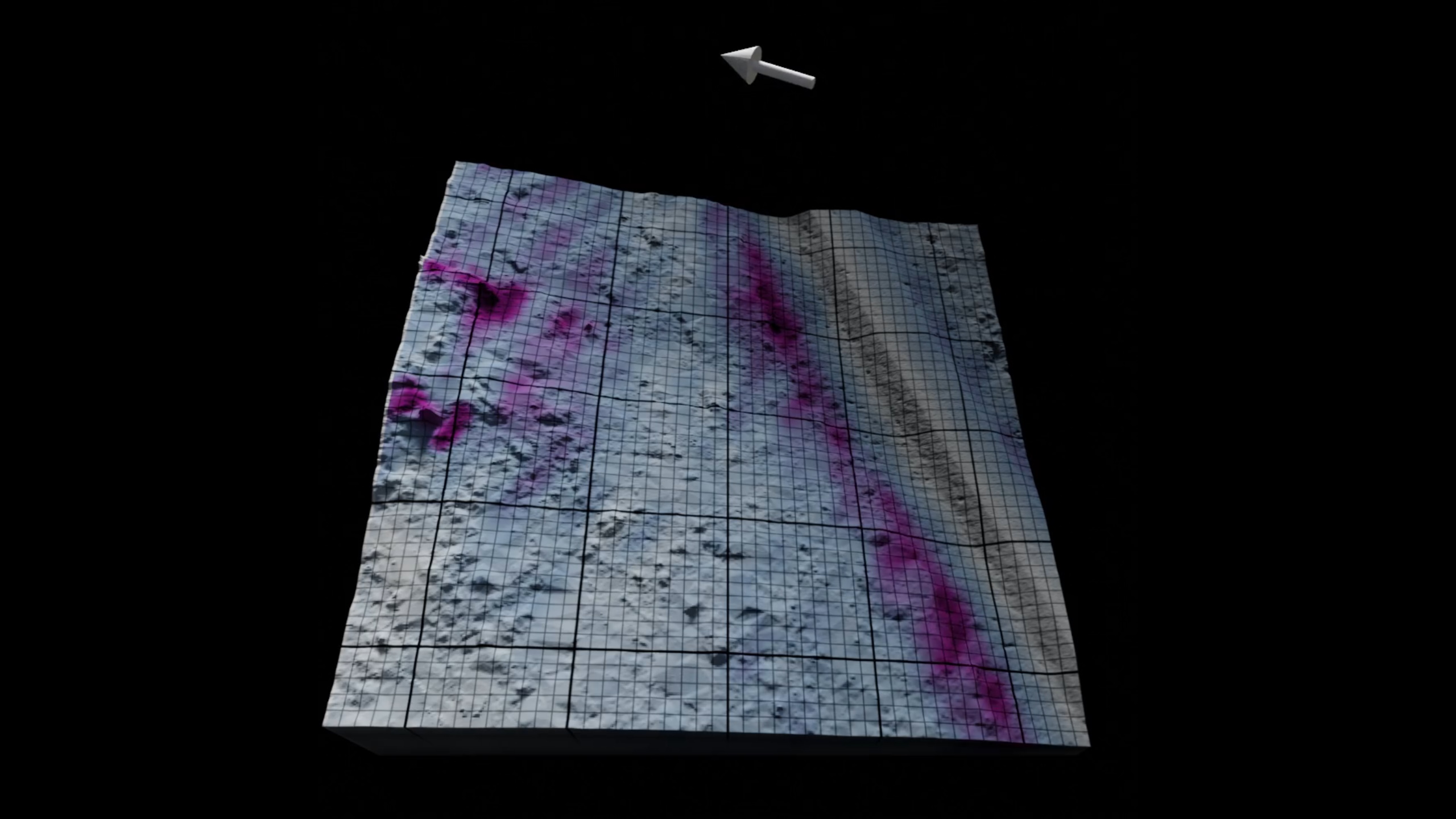
Traversability is expressed as three independent measures: the ability to traverse the terrain at a target speed, energy consumption, and acceleration. The measures are continuous and reflect different objectives for planning that go beyond binary classification.
A deep neural network is trained to predict the traversability measures from the local heightmap and target speed.
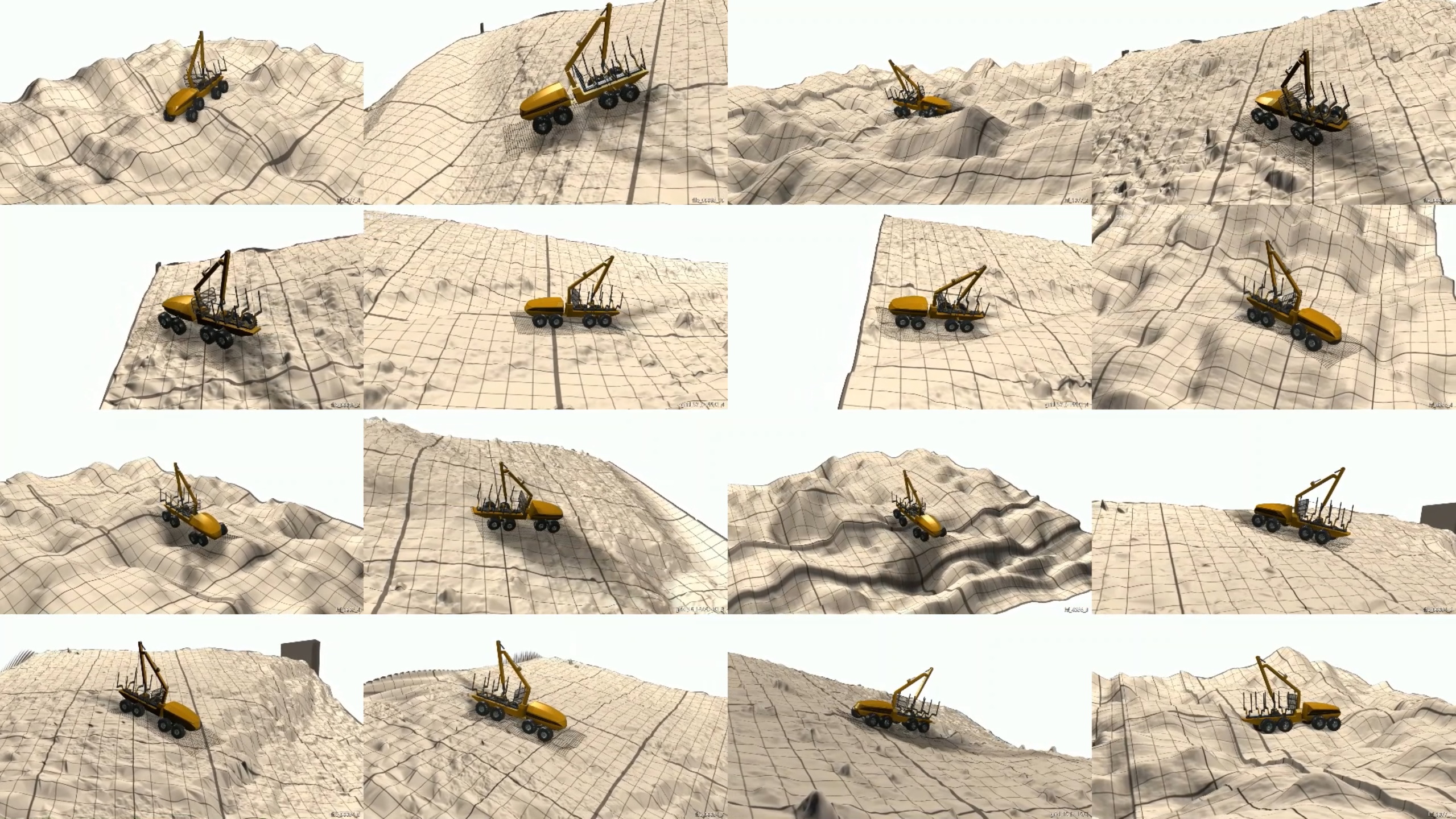
To produce training data, we use an articulated vehicle with wheeled bogie suspensions and procedurally generated terrains.
We evaluate the model on laser-scanned forest terrains, previously unseen by the model. The model predicts traversability with an accuracy of 90%. Predictions rely on features from the high-dimensional terrain data that surpass local roughness and slope relative to the heading. Correlations show that the three traversability measures are complementary to each other.
With an inference speed 3000 times faster than the ground truth simulation and trivially parallelizable,
the model is well suited for traversability analysis and optimal route planning over large areas.
Video - Vehicle model

Video - Simulation samples
Video - Locomotion map
Video - Energy consumption map
Video - Energy consumption along a path
This work was supported by Mistra Digital Forest (Grant DIA 2017/14 #6) and Algoryx Simulation AB. The simulations were performed on resources provided by the Swedish National Infrastructure for Computing (SNIC dnr 2021/5-234) at High Performance Computing Center North (HPC2N).
The Bo Rydin’s foundation for scientific research (award no F19/17) was co-financing the acquisition of laser scanning data.
|
|
UMIT Research Lab, Digital Physics
|
|