VK. Aoshima, M. Servin, and E. Wadbro. Simulation-Based Optimization of High-Performance Wheel Loading. 38th International Symposium on Automation and Robotics in Construction (ISARC), Dubai, UAE (2021).
arXiv:2107.14615 [
pdf]
Having smart and autonomous earthmoving in mind, we explore high-performance wheel loading in a simulated environment.
This paper introduces a wheel loader simulator that combines contacting 3D multibody dynamics with a hybrid continuum-particle terrain model,
supporting realistic digging forces and soil displacements at real-time performance.
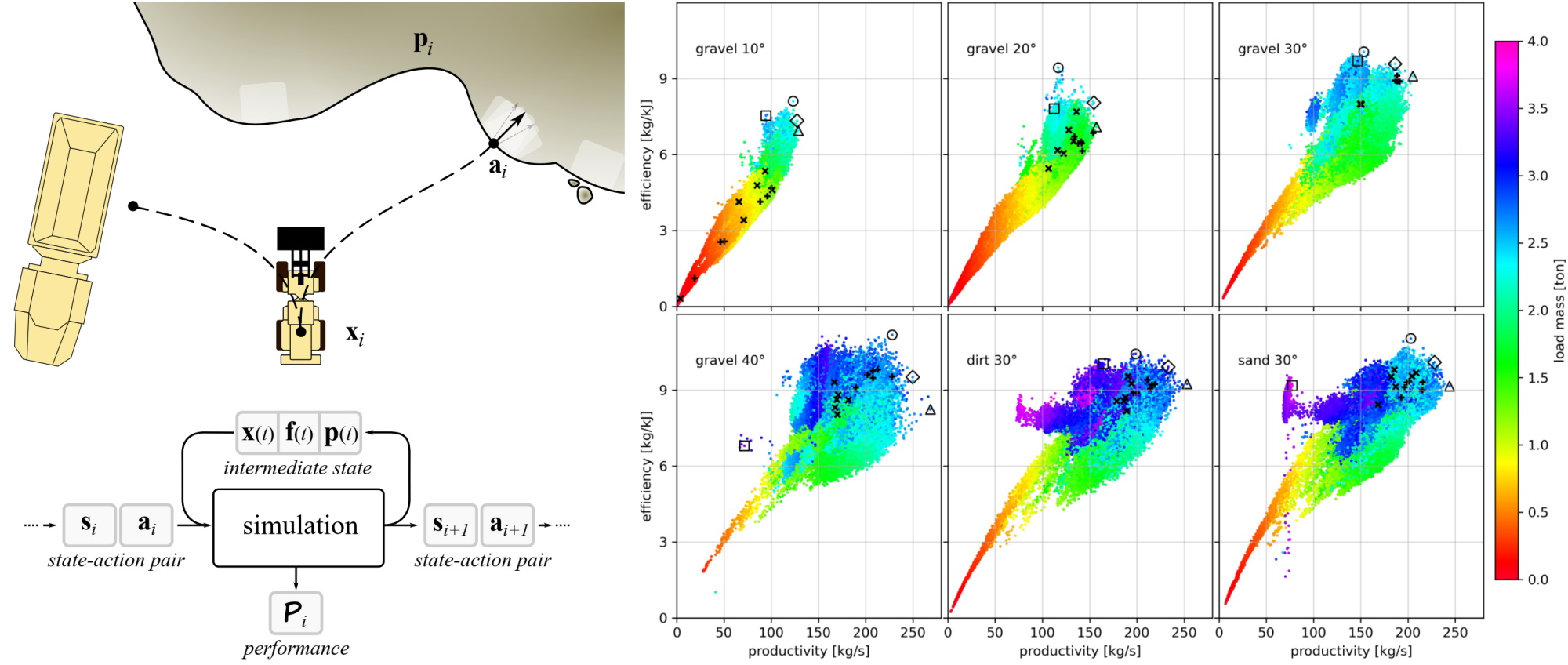
A total of 270,000 simulations are run with different loading actions, pile slopes, and soil to analyze how they affect the loading performance.
The results suggest that the preferred digging actions should preserve and exploit a steep pile slope.
High digging speed favors high productivity, while energy-efficient loading requires a lower dig speed.
This work has in part been supported by Komatsu Ltd
and Algoryx Simulation AB. The simulations were performed on resources provided by the Swedish National
Infrastructure for Computing (SNIC dnr 2021/5-234) at
High Performance Computing Center North (HPC2N).
|
|
UMIT Research Lab, Digital Physics
|