Fälldin A, Wallin E, Löfstedt T, and Servin M. Synthesizing multi-log grasp poses.
arxiv:2403.11623 (2024). [
pdf]
Multi-object grasping is a challenging task. It is important for energy
and cost-efficient operation of industrial crane manipulators, such as those used
to collect tree logs off the forest floor and onto forest machines.
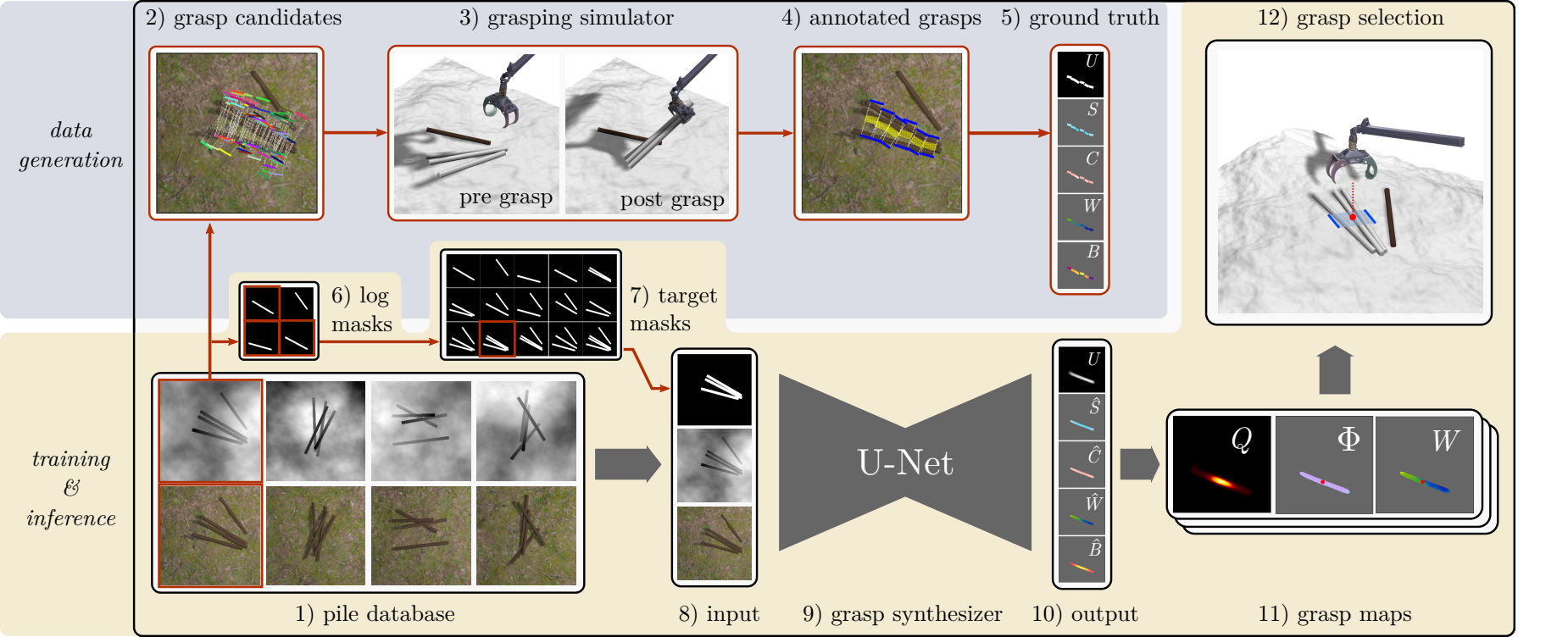
In this work, we used synthetic data from physics simulations to explore how data-driven modeling can be used to infer multi-object grasp poses from images. We showed that convolutional neural networks can be trained specifically for synthesizing multi-object grasps. Using RGB-Depth images and instance segmentation masks as input, a U-Net model outputs grasp maps with corresponding grapple orientation and opening width. Given an observation of a pile of logs, the model can be used to synthesize and rate the possible grasp poses and select the most suitable one, with the possibility to respect changing operational constraints such as lift capacity and reach.
When tested on previously unseen data, the proposed model found successful grasp poses with an accuracy of 95%.
Dataset available soon
Videos
This work was partially supported by Mistra Digital Forest Grant DIA 2017/14 \#6, Cranab AB, and the Wallenberg AI, Autonomous Systems and Software Program (WASP) funded by the Knut and Alice Wallenberg Foundation.
|
|
UMIT Research Lab, Digital Physics
|
| | |