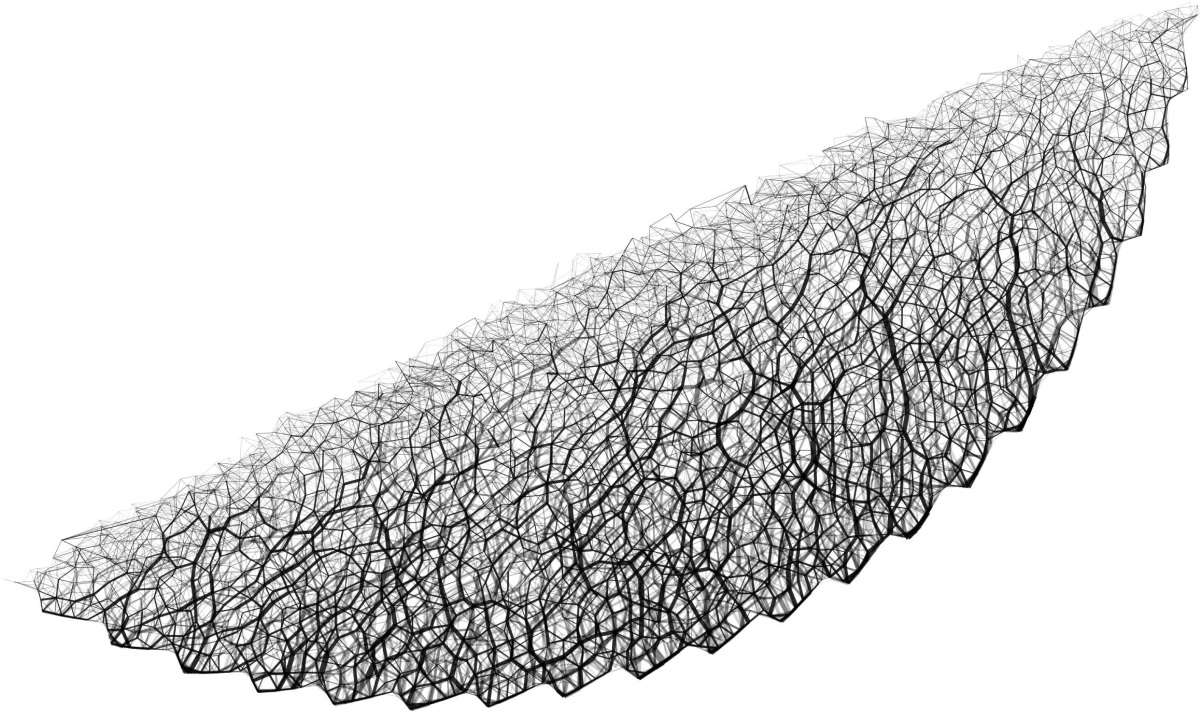
The contact forces form force networks. These are weighted
graphs with the particles as nodes and
contact forces as edges. We use the normal force
magnitude for the edge weight. In granular materials
with too few iterations the strong force chains that are
a characteristic feature of granular materials do not appear.
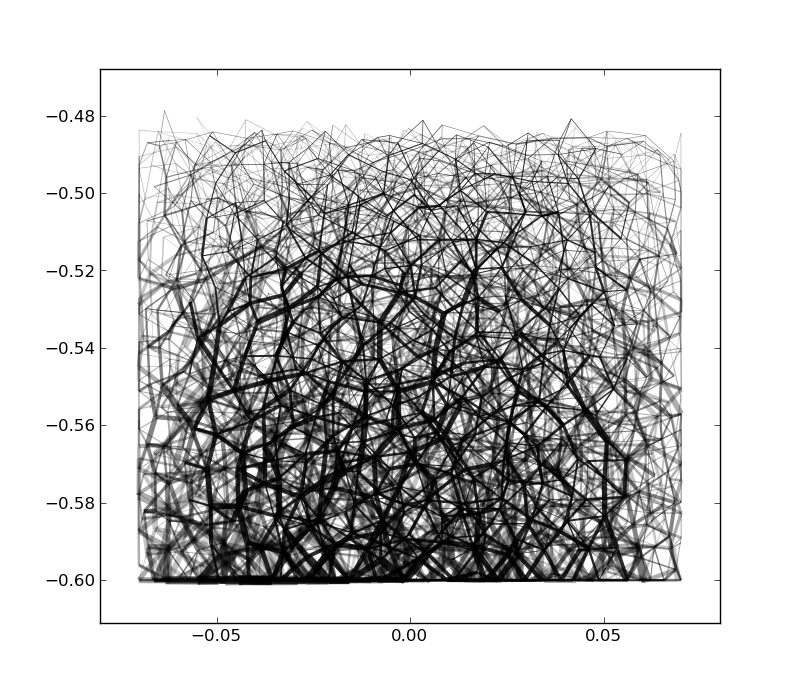
Instead, the force distributes as the hydrostatic pressure
in a fluid, i.e., increases linearly with depth from the top
surface. When increasing the number of iterations,
strong force chain structures emerge and with this the
pressure force saturate and become independent of depth in the
column. This is the well-known Janssen effect of
granular materials,
which is due to an arching effect of the force chains whereby the
container walls carry part of the weight of the material
Click
here for more force network figures.